

Moteurs Stirling
Le moteur Stirling à gaz est un moteur thermique alternatif à combustion externe qui opère selon un cycle fermé avec régénération. Son rendement théorique est égal à celui de Carnot, ce qui explique la fascination qu'il exerce sur de nombreux chercheurs et ingénieurs.
Le premier brevet concernant ce type de moteur a été déposé en 1816 par l'écossais Robert Stirling, qui cherchait à développer un appareil moins dangereux que les moteurs à vapeur. Comme, au XIXe siècle, son fluide technique était de l'air, c'est sous le nom de moteur à air chaud qu'il a rapidement connu un grand succès. Ses applications étaient très nombreuses, industrielles comme le pompage de l'eau aussi bien que domestiques comme la ventilation des locaux. Depuis le début du XXe siècle, les moteurs alternatifs à combustion interne et le développement de la motorisation électrique ont progressivement détrôné les moteurs Stirling, qui ne sont aujourd'hui que très peu employés.
Vers le milieu des années 1930, la société hollandaise Philips a massivement investi dans cette technologie, son objectif étant de disposer de petits générateurs autonomes pour l'alimentation électrique des postes radios isolés, avec le souci de développer un moteur silencieux, fonctionnant avec une maintenance minimale, et de bon rendement.
Les travaux de Phillips ont engendré de nombreuses percées significatives, et ont notamment permis de multiplier la puissance massique par 50, renouvelant complètement les perspectives de développement du moteur Stirling. En 1957 General Motors s'associa avec Philips pour développer un moteur destiné à la traction automobile, mais, malgré de belles réussites techniques, le partenariat ne fut pas reconduit 10 ans plus tard.
Aujourd'hui, de nombreux experts s'accordent pour considérer que le moteur Stirling pourrait connaître un essor significatif dans le futur, compte tenu d'une part des avantages qu'il présente, notamment en matière de protection de l'environnement, et d'autre part des nombreuses sources chaudes susceptibles d'être utilisées pour l'animer. Il présente des atouts particuliers pour des utilisations telles que la propulsion maritime, en particulier celle des sous-marins, pour la production d'électricité de petite puissance en zone isolée, à partir de différentes sources d'énergie (solaire, biomasse, combustibles fossiles), et pour la petite cogénération.
Principe de fonctionnement
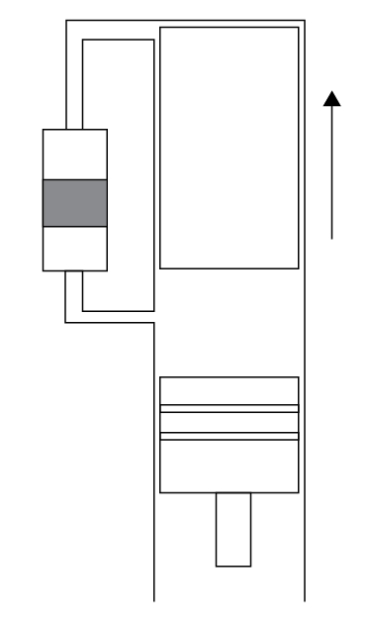
Le principe de base d'un moteur Stirling est très simple : il s'agit de successivement chauffer puis refroidir un gaz enfermé dans un cylindre fermé, muni d'un piston. La différence de pression qui s'établit dans l'enceinte peut être transformée en travail moteur. La difficulté est qu'il est quasiment impossible, compte tenu de l'inertie thermique du cylindre, de le chauffer et refroidir suffisamment vite pour que le système fonctionne dans des conditions optimales. L'idée de Robert Stirling a été de mettre le gaz en mouvement en introduisant un dispositif particulier dont nous allons analyser le fonctionnement, le déplaceur. La structure du moteur est représentée dans cette figure.
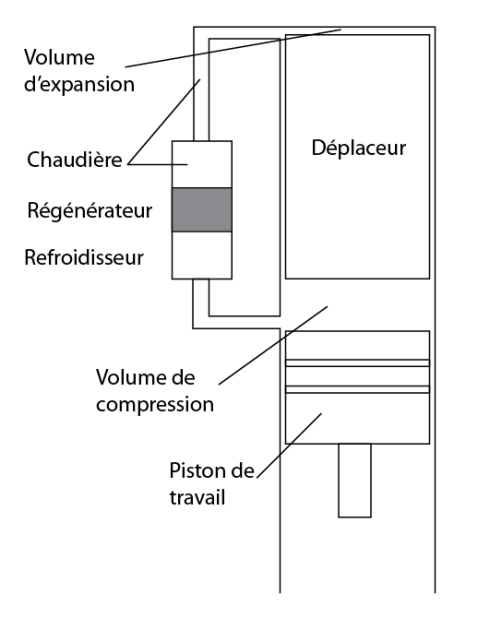
Dans une enceinte principale peuvent se mouvoir d'une part un piston de travail, et d'autre part un déplaceur, dont le rôle est de transvaser le fluide de travail depuis le volume de compression vers le volume d'expansion, et réciproquement.
Lors du transvasement, le fluide parcourt successivement, dans un sens ou dans l'autre, la chaudière à la température T3, le régénérateur, et le refroidisseur à la température T1.
Le cycle se déroule selon les quatre phases illustrées par les schémas ci-dessous.
Pendant la phase de compression a), le déplaceur se trouve en position haute, et le fluide, entièrement situé dans la zone froide, est comprimé par le piston de travail dans sa course vers le haut, ce qui nécessite l'apport d'un travail W12.
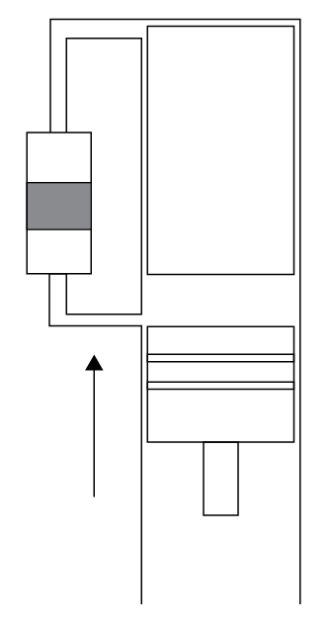
Au point 2, le piston est au point mort haut, et le déplaceur est ramené en position basse, ce qui a pour effet de transvaser le fluide comprimé, qui passe pendant la phase b) de la zone froide vers la zone chaude, commençant par se réchauffer au passage dans le régénérateur, puis recevant de la chaleur de la chaudière. Cette transformation se faisant à volume constant, la pression augmente dans le rapport des températures T3 et T1.
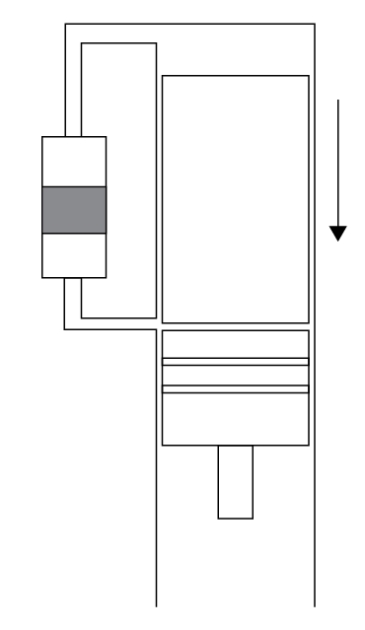
Au cours de la phase de détente c), le fluide se détend dans le volume d'expansion, où il continue d'être chauffé par les tubes de la chaudière. Cette détente a pour effet de repousser le piston de travail vers le bas, et fournit le travail utile W34. Au cours de cette phase, le déplaceur et le piston se déplacent ensemble.
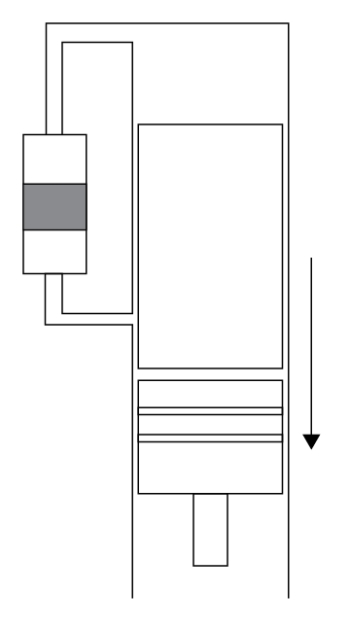
Pendant la phase d), après que le piston de travail a atteint le point mort bas, le déplaceur est ramené en position haute, ce qui a pour effet de transvaser le fluide de la zone chaude (volume d'expansion) vers la zone froide (volume de compression). Au cours de ce transfert à volume constant, le fluide commence par céder ses calories au régénérateur, puis il est refroidi par le refroidisseur.
Il faut noter que le déplaceur ne produit aucun travail. La pression sur ses deux faces opposées est toujours la même, aux pertes de charge près à travers les trois échangeurs (chaudière, régénérateur et refroidisseur).
Dans la pratique, les mouvements relatifs du déplaceur et du piston sont obtenus de diverses manières, en particulier par des dispositifs mécaniques à base de bielles et vilebrequin. Les mouvement, décrits ci-dessus comme étant discontinus, sont donc en réalité, à peu de chose près, sinusoïdaux, et un déphasage d'environ 90° entre le déplaceur et le piston de travail est généralement retenu.
Exemple de modèle de moteur Stirling
Un exemple de modélisation dans Thermoptim d'un moteur Stirling est donné dans la modélothèque.
Attention : les modèles de moteurs Stirling que l'on peut réaliser avec un outil comme Thermoptim ne sont pas très précis, car le progiciel fait l'hypothèse que les composants sont en régime stationnaire, alors que ce n'est pas le cas dans un tel moteur.
Les mouvements continus du piston et du déplaceur induisent des phénomènes de nature aérodynamique (pertes de charge, établissement d'ondes de pression dues à l'écoulement pulsé) qu'il est extrêmement difficile de modéliser.
